 欢迎访问弓创信息科技(成都)有限公司的网站
欢迎访问弓创信息科技(成都)有限公司的网站

- 公司名称:弓创信息科技(成都)有限公司
- 联系人:王总
- 手机:18210591164
- 公司地址:四川省成都市易试验区成都市天府新区湖畔路北段366号1栋3楼1号
机器人


- 产品名称:涂胶机器人工具中心点_自动化机器人相关-弓创信息科技(成都)有限公司
- 产品价格:面议
- 产品数量:1
- 保质/修期:1
- 保质/修期单位:年
- 更新日期:2021-08-28
产品说明
CaliRobot有什么特点?和极小误差可快速的获得高质量结果无需预校准工具中心点对可疑数据自动报警支持报告格式自定义支持多种类型的机器人(ABB、KUKA、FANUC……)•机器人工件座标系是由工件原点与座标方位组成!•机器人程序支持多个Wobj,可以根据当前工作状态进行变换.•外部夹具被更换,重新定义Wobj后,可以不更改程序,直接运行!•通过重新定义Wobj,可以简便的完成一个程序适合多台机器人!
2)Linear线性运动机器人工具姿态不变,机器人TCP沿座标轴线性移动!•机器人程序支持多个TCP,可以根据当前工作状态进行变换.•机器人工具被更换,重新定义TCP后,可以不更改程序,直接运行!定义工具坐标系的方法:N(N=4)点法/TCP法-机器人TCP通过N种不同姿态同某相碰,得出多组解,通过计算得出当前TCP与机器人手腕中心点(tool0)相应位置,座标系方向与tool0一致。TCPZ法-在N点法基础上,Z点与连线为座标系Z方向.
CaliRobot是什么?CaliRobot是一款易用的工业机器人工位标定软件!能够计算工具中心点TCP能够计算机器人基坐标系与工件坐标系的转换关系WhatisCaliRobot?CaliRobotisanACCURATEANDEASY-TO-USEapplicationforCellAlignment!+ToolCenterPoint+Transformationbetweenrobotbaseandpartcoordinatesystem------------------------------------------------------------------------为什么需要用CaliRobot进行机器人工位标定?为了提高工位内机器人的定位精度,从而获得更的作业和更高的质量输出!
WhatarethefeaturesofCaliRobot?HighaccuracyandminimalerrorFastandefficienttogethighqualityresultNoneedforcoordinateofthemeasuredtoolAutomaticalarmingforsuspectedinputdataSupportcustomizationforreportSupportdifferentkindsofrobot(ABB,KUKA,FANUC.
我们推荐涂胶机器人工具中心点
TCPX,Z法-在N点法基础上,X点与连线为座标系X方向,Z点与连线为座标系Z方向.工件坐标系•机器人工件座标系是由工件原点与座标方位组成!•机器人程序支持多个Wobj,可以根据当前工作状态进行变换。•外部夹具被更换,重新定义Wobj后,可以不更改程序,直接运行.•通过重新定义Wobj,可以简便的完成一个程序适合多台机器人!定义工件坐标系的方法:•三点法-点X1与点X2连线组成X轴,通过点Y1向X轴作的垂直线,为Y轴!
高品质涂胶机器人工具中心点
弓创信息科技(成都)有限公司弓创信息科技,我们巍峨耸立于四川省成都市易试验区成都市天府新区湖畔路北段366号1栋3楼1号,我们在这里等待您的到来。 也可以通过电话联系: 联系方式:18210591164 联系人:总 致电我们,有意向不到的惊喜!
机器人TCP_机器人设备相关-弓创信息科技(成都)有限公司

公司计量资产管理_其它气体液体计量仪表相关-弓创信息科技(成都)有限公司
坐标系包含:基坐标系(BaseCoordinateSystem)大地坐标系(WorldCoordinateSystem)工具坐标系(ToolCoordinateSystem)工件坐标系(WorkObjectCoordinateSystem)工具坐标系•机器人工具座标系是由工具中心点TCP与座标方位组成!•机器人联动运行时,TCP是必需的!1)Reorient重定位运动(姿态运动)机器人TCP位置不变,机器人工具沿座标轴转动,改变姿态.
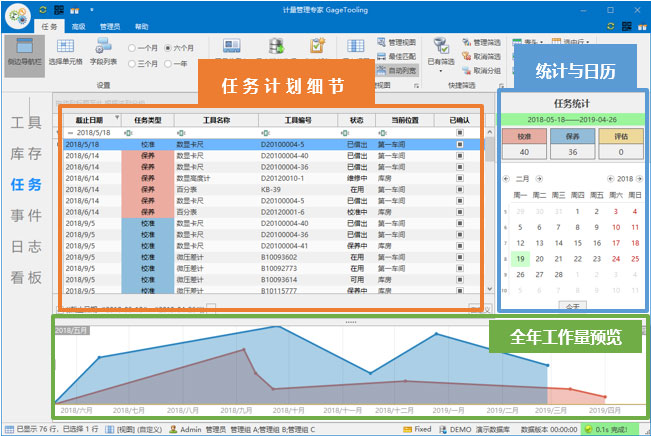
成都量具管理专家_量具量仪相关-弓创信息科技(成都)有限公司

计量量具资产管理_软件开发-弓创信息科技(成都)有限公司
供应商信息
弓创信息科技(成都)有限公司
软件开发
公司地址:四川省成都市易试验区成都市天府新区湖畔路北段366号1栋3楼1号
企业信息
联系人:王总
手机:18210591164
注册时间: 2022-08-16
软件开发
公司地址:四川省成都市易试验区成都市天府新区湖畔路北段366号1栋3楼1号
企业信息
联系人:王总
手机:18210591164
注册时间: 2022-08-16