 欢迎访问弓创信息科技(成都)有限公司的网站
欢迎访问弓创信息科技(成都)有限公司的网站

- 公司名称:弓创信息科技(成都)有限公司
- 联系人:王总
- 手机:18210591164
- 公司地址:四川省成都市易试验区成都市天府新区湖畔路北段366号1栋3楼1号
机器人


- 产品名称:工业机器人离线编程_焊接机器人报价相关-弓创信息科技(成都)有限公司
- 产品价格:面议
- 产品数量:1
- 保质/修期:1
- 保质/修期单位:年
- 更新日期:2021-08-28
产品说明
TCPX,Z法-在N点法基础上,X点与连线为座标系X方向,Z点与连线为座标系Z方向!工件坐标系•机器人工件座标系是由工件原点与座标方位组成!•机器人程序支持多个Wobj,可以根据当前工作状态进行变换!•外部夹具被更换,重新定义Wobj后,可以不更改程序,直接运行。•通过重新定义Wobj,可以简便的完成一个程序适合多台机器人.定义工件坐标系的方法:•三点法-点X1与点X2连线组成X轴,通过点Y1向X轴作的垂直线,为Y轴!
CaliRobot是什么?CaliRobot是一款易用的工业机器人工位标定软件!能够计算工具中心点TCP能够计算机器人基坐标系与工件坐标系的转换关系WhatisCaliRobot?CaliRobotisanACCURATEANDEASY-TO-USEapplicationforCellAlignment。+ToolCenterPoint+Transformationbetweenrobotbaseandpartcoordinatesystem------------------------------------------------------------------------为什么需要用CaliRobot进行机器人工位标定?为了提高工位内机器人的定位精度,从而获得更的作业和更高的质量输出!
我们推荐工业机器人离线编程
WhatarethefeaturesofCaliRobot?HighaccuracyandminimalerrorFastandefficienttogethighqualityresultNoneedforcoordinateofthemeasuredtoolAutomaticalarmingforsuspectedinputdataSupportcustomizationforreportSupportdifferentkindsofrobot(ABB,KUKA,FANUC!
如果您想咨询机器人更多信息,请致电总:18210591164;珍惜与每个对机器人有需求的企业、个人 能有进一步的交流机会,欢迎各大企业、个人光临公司本部,弓创信息科技(成都)有限公司详细地址:四川省成都市易试验区成都市天府新区湖畔路北段366号1栋3楼1号。
2)Linear线性运动机器人工具姿态不变,机器人TCP沿座标轴线性移动。•机器人程序支持多个TCP,可以根据当前工作状态进行变换。•机器人工具被更换,重新定义TCP后,可以不更改程序,直接运行!定义工具坐标系的方法:N(N=4)点法/TCP法-机器人TCP通过N种不同姿态同某相碰,得出多组解,通过计算得出当前TCP与机器人手腕中心点(tool0)相应位置,座标系方向与tool0一致!TCPZ法-在N点法基础上,Z点与连线为座标系Z方向.
坐标系包含:基坐标系(BaseCoordinateSystem)大地坐标系(WorldCoordinateSystem)工具坐标系(ToolCoordinateSystem)工件坐标系(WorkObjectCoordinateSystem)工具坐标系•机器人工具座标系是由工具中心点TCP与座标方位组成!•机器人联动运行时,TCP是必需的!1)Reorient重定位运动(姿态运动)机器人TCP位置不变,机器人工具沿座标轴转动,改变姿态.
失效模式后果分析_诚信经营软件开发-弓创信息科技(成都)有限公司

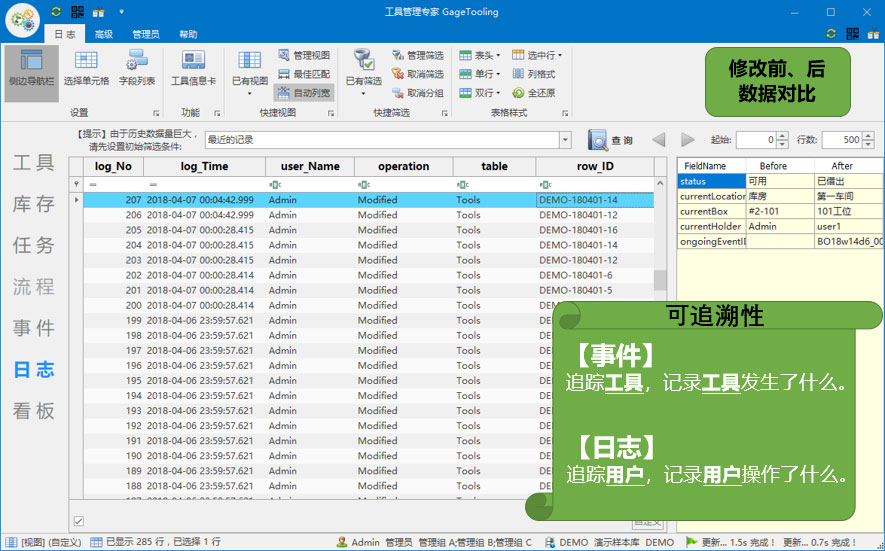
公司计量可追溯性_0001软件开发-弓创信息科技(成都)有限公司

PFMEA软件哪家好_服装软件相关-弓创信息科技(成都)有限公司
高品质工业机器人离线编程
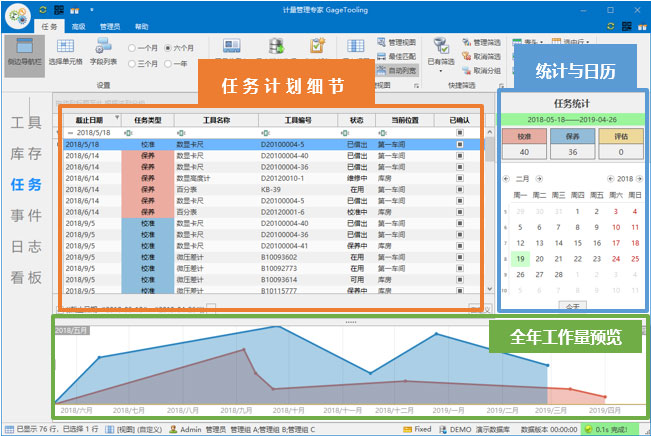
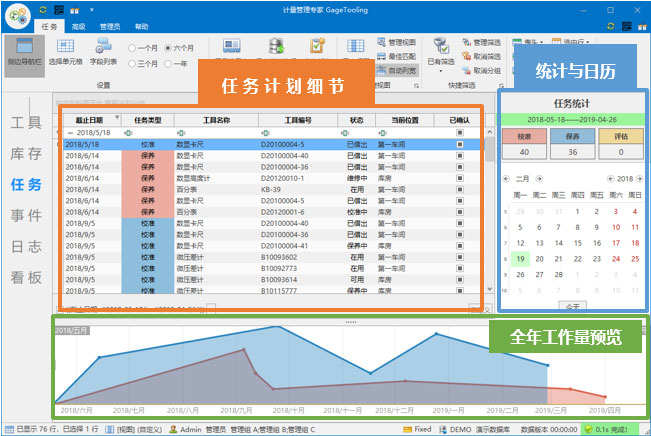
计量量具资产管理_软件开发-弓创信息科技(成都)有限公司
CaliRobot有什么特点?和极小误差可快速的获得高质量结果无需预校准工具中心点对可疑数据自动报警支持报告格式自定义支持多种类型的机器人(ABB、KUKA、FANUC……)•机器人工件座标系是由工件原点与座标方位组成!•机器人程序支持多个Wobj,可以根据当前工作状态进行变换!•外部夹具被更换,重新定义Wobj后,可以不更改程序,直接运行。•通过重新定义Wobj,可以简便的完成一个程序适合多台机器人。
这个是GBA的机器人大战吗?
不是,此游戏为网络游戏,你可视此“机战”为网络版机器人大战游戏,可以尝试玩下。
家务型机器人怎么样工作的
主要是传感器,将外界信息比如距离,温度,湿度,光,声。等信息传输给处理器进行判断(那处理器的逻辑部分(相当于人的精神思维)就由程序员来编程实现)然后再来控制机械臂进行各种操作
VEX机器人跟乐高机器人有什么不同?那个更好?
VEX机器人的难度与挑战性会比乐高机器人高出很多,更能够提起孩子学习的持久性兴趣,给孩子创造更好的竞赛舞台与挑战。乐高相对来说可能就给不到那么多的平台了。泊思地青少年创意培训中心从2003年后面每届VEX工程挑战赛泊思地都能有非常好的成绩。之前的就不说了,近几年的话有2012 年美国世锦赛总冠军、2013年亚太赛冠军、季军;2014年全国赛高中组冠亚军等。详细的可以到校区,亲自看一下超级多的奖杯和奖状哦。闸北区:万荣路700号C7,103。大宁中心广场内。普陀区:光复西路325号,近东新路。靠近苏州河宝城桥。地铁或者开车都可以,停车方便。
诺霸上海总经理曾鸿炼在他的演讲中提到三个改变世界的案例,一是苹果电脑公司推出IPhone手机;二是特斯拉(Tesla)汽车;三是Android之父AndyRobinson跳糟到Google主导机器人制造。这三个案例都给世界带来了颠覆性的变化,而诺霸今年新推出的新品EVOTORQUE——搭载智能连接传感技术的电动扭矩扳手,它的上市也将给扭矩工具行业带来翻天覆地的变化。诺霸的产品,也将改变世界。最后,曾总还抛出四个发人深省的问题让经销商们回去思考,即为什么要做NORBAR?如何做好NORBAR?经销商需要的是什么?如何共创多赢局面?相信带着这些问题出发,诺霸的经销商们会有更加明确的前进方向和奋斗目标。
供应商信息
弓创信息科技(成都)有限公司
软件开发
公司地址:四川省成都市易试验区成都市天府新区湖畔路北段366号1栋3楼1号
企业信息
联系人:王总
手机:18210591164
注册时间: 2022-08-16
软件开发
公司地址:四川省成都市易试验区成都市天府新区湖畔路北段366号1栋3楼1号
企业信息
联系人:王总
手机:18210591164
注册时间: 2022-08-16